гляд технічних рішень, призначених для автоматизації керування польовою технікою під час виконання нею технологічних операцій.
Одним з основних елементів концепції точного землеробства є застосування сучасних технологій навігації — систем паралельного й автоматичного водіння. Вони дають можливість зменшити експлуатаційні витрати та збільшити ефективність використання техніки й інших ресурсів.
Паралельне водіння
Серед найпростіших засобів навігації в полі представлені системи паралельного водіння за показами курсора (таблиця). Такі системи дозволяють досягти динамічної точності руху з відхиленням ±30 см і забезпечують оператора додатковою інформацією під час розворотів або водіння по криволінійній траєкторії.
Деякі з представлених на ринку пристроїв мають як світлодіодні індикатори відхилення від маршруту, так і рідкокристалічні дисплеї. Інші — лише індикатори відхилення від маршруту (фото 1).
Фото 1. Системи паралельного водіння за вказівками курсора моделей EZ-Guide 250 (а) і GreenStar Lightbar (б)
Без допомоги механізатора
Для забезпечення вищої точності руху агрегата по заданій траєкторії система паралельного водіння за показами курсора дооснащується контролером та підкермовувальним пристроєм, що забезпечує паралельне водіння з точністю до ±10 см. Виробники техніки пропонують кілька типів підкермовувальних пристроїв: із приводним фрикційним роликом, із кермовим хомутом й електронне кермо.
Підкермовувальні пристрої з автоматичним повертанням керма за допомогою фрикційного ролика, який приводиться в рух за допомогою електродвигуна (гідродвигуна), пропонують фірми Trimble (модель AgGPS EZ-Steer) (фото 2, а) та Leica (модель QuickSteer).
Системи водіння з приводним роликом керма можуть бути встановлені на будь-яку сільськогосподарську машину, обладнану кермовим колесом. Їх можна змонтувати за незначний проміжок часу (близько 30 хв). За потреби переведення водіння в режим ручного керування під час обертання кермового колеса руками водія зчеплення з приводом підкермовувального пристрою автоматично вимикається. Застосування такого типу керування машиною дозволяє одержати точність ведення 15–30 см, а з використанням дифпоправки — 5–10 см.
Підкермовувальний пристрій із кермовим хомутом виготовляють фірми Ag Leader (модель OnTrack3), Raven (модель Smart Steer) (фото 2, б) й ін. Така система паралельного водіння складається з кермового хомута, зубчастого та накладного дисків. Вона зручніша в експлуатації, хоча для встановлення та налаштування знадобиться більше часу.
Фірма Trimble представляє підкермовувальний пристрій EZ-Pilot (фото 2, в), який вбудовується в кермову колонку й може встановлюватись на більшість марок тракторів і комбайнів.
Фото 2. Підкермовувальні пристрої: з приводним роликом (а); з кермовим хомутом (б); електронне кермо (в)
Електронне кермо монтується замість стандартного кермового колеса. Воно має високий крутний момент і достатній запас потужності, що гарантує ефективність його роботи. Висока швидкість реакції електродвигуна дозволяє системі швидко коригувати курс. Ця система керування також використовує технологію компенсації нерівностей рельєфу T3, яка підвищує точність роботи на нерівній місцевості, а також на схилах. Електронне кермо AES-25 пропонує й компанія Topcon.
Рис. 1. Схеми визначення кута нахилу та компенсації нерівностей місцевості
Рис. 2. Складові системи автоматичного водіння
Пристрої компенсації нерівностей місцевості (рис. 1) оснащуються трьома гіроскопами для визначення нахилу під час роботи на будь-яких типах поверхні (поперечні та поздовжні схили). Вони розраховують різницю між розташуванням антени GPS і реальним розміщенням центральної точки технічного засобу на поверхні поля. Незалежно від кута нахилу технологія підвищує точність під час руху по нерівній поверхні, на схилах, пагорбах, уступах тощо. Інформація про кут нахилу машини обробляється на контролері й передається на виконавчий механізм підкермовувального пристрою.
Таблиця. Коротка характеристика систем паралельного водіння деяких провідних фірм
Виробник
Trimble, США
Torcon, Японія
RAVEN, Європа
Leica, Швейцарія
TeeJet, США
Claas, Німеччина
Серія
EZ-Guide 250
110
Cruizer
Mojo mini
CenterLine
MatrixPro
Copilot
Copilot TS
Навігаційна система
GPS
GPS; Glonass
GPS; Glonass
GPS; Glonass
GPS
GPS; Glonass
GPS
GPS
Супутникові канали
14
32
12
14
12
12
12
12
Діагональ дисплея, см
12
12,5
14,5
10
відсутній
14,5
відсутній
19
Точність GPS, см
25
40
30
50
40-50
40-50
30
30
Коли кермо непотрібне
Автопілотування сільгосптехнікою може виконуватись і без додаткового обладнання на кермовій колонці. Замість цього працюють гідравлічні клапани, що отримують сигнали від контролера й перетворюють їх в гідравлічні, які система використовує для утримання транспортного засобу на заданому курсі. Як приклад можна згадати інтегровану систему автоматичного водіння IntelliStee виробництва фірми New Holland, що дозволяє працювати з динамічною точністю до ±2,5 см.
Компанія Ag Leader Technology (США) пропонує дві системи автоматичного водіння — Geosteer і Paradyme (фото 3). Ними можуть комплектуватися трактори й самохідні машини виробництва фірм CNH, AGCO, John Deere тощо. Система водіння Geosteer оснащена контролером і гіроскопом, який відстежує нахили, крен трактора й допомагає утримувати правильну траєкторію руху. Система Paradyme не комплектується гіроскопом, а визначає нахили та крен трактора за своїми двома антенами. Її застосовують здебільшого в овочівництві для досягнення точності роботи на малих швидкостях, адже її мінімальна швидкість роботи — 80 м/год.
Фото 3. Системи автоматичного водіння Geosteer (а) та Paradyme (б)
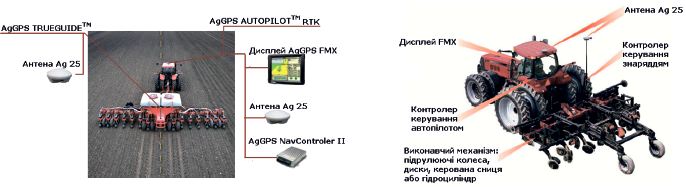
Точність для знаряддя
Система автоматичного водіння Autopilot з обладнанням TrueGuide від New Holland (рис. 3), що монтується на знарядді, забезпечує прямолінійність рядків під час роботи енергозасоба в агрегаті з причіпним обладнанням на полях із горбистим рельєфом. Вона сама підтягне агрегат в потрібний бік і забезпечить, щоб трактор тягнув його точно за собою. Тобто трактор зміщується із заданої лінії таким чином, щоб утримати на ній агрегатоване обладнання. Спільне використання систем TrueGuide й Autopilot дозволяє зменшити зміщення знаряддя на 50%, як порівняти із застосуванням тільки системи Autopilot.
Для коригування траєкторії руху причіпного знаряддя система комплектується додатковим GPS-приймачем і використовує вже встановлену на тракторі систему Autopilot і багатофункціональний дисплей FmX.
Рис. 3. Трактор і сівалка з обладнанням TrueGuide Рис. 4. Система активного керування агрегатованим обладнанням TrueTracker
Система активного керування агрегатованим обладнанням TrueTracker (рис. 4) взаємодіє із системою автоматичного водіння Autopilot і забезпечує можливість руху трактора та машини по одній лінії на полях із різнотипним рельєфом. Трактором керує система Autopilot, а на знаряддя монтується окрема система TrueTracker, яка керує знаряддям за допомогою відповідного гідравлічного рішення. Місцеположення знаряддя визначається за допомогою додаткової антени GNSS, що з’єднана з агронавігатором FmX, у якому активовано другий приймач. На агрегатованій машині також установлюється NavController і керований ним виконавчий механізм. На різних типах машин можуть установлюватися кілька різновидів виконавчих механізмів: підкермовувальні колеса, керовані диски, керована сниця або гідроциліндр.
Система інтелектуального комплексного керування обладнанням iTEC Pro компанії John Deere поєднує в собі системи автоматичного водія AutoTrac і керування обладнанням IMS для контролю швидкості трактора, вала відбору потужності, клапанів секційного гідророзподільника, механічного переднього приводу й блокування диференціала, підйому передньо- та задньоначіпних знарядь. Вона виконує такі функції: повороти в кінці гону в автоматичному режимі, повне керування обладнанням, оптимізація процесу роботи знарядь.
Авторозворот
Фірма Trimble виготовляє автоматичну систему розвороту NextSwath, яка підвищує ефективність і точність усіх сільськогосподарських операцій. Під час виконання розвороту в кінці гону система NextSwath самостійно обчислює та вибирає найкращу траєкторію розвороту трактора, а потім повністю автоматично вибирає прохід. За умови застосування причіпного обладнання, особливо з великою робочою шириною, ця технологія дозволяє уникнути пропусків або перекриття після повороту.
Точність для комбайнів
Сучасні зернозбиральні комбайни можуть комплектуватися однією з двох автоматичних систем керування, які працюють або за допомогою супутникової навігації, або ж за допомогою електрооптичної системи.
Системами автоматичного водіння за допомогою GPS-приймача комплектуються комбайни всіх провідних фірм. Наприклад, зернозбиральні комбайни серії CR фірми New Holland комплектуються повністю інтегрованою системою автоматичного водіння IntelliSteer, яка забезпечує точність в полі близько 1–2 см шляхом використання сигналу диференційного коригування RTK.
Електрооптичні датчики за допомогою світлових імпульсів визначають межу між нескошеними рослинами та стернею й забезпечують точне ведення жатки вздовж крайнього обрису незібраного хлібостою. Прикладом є лазерна система Laserpilot в комбайнах Claas Tucano (рис. 5). Комбайни New Holland оснащено лазерною системою SmartSteer. Комбайни Case комплектуються електрооптичною системою ведення Cruise Cut.
Відомо, що для ефективної роботи комбайна потрібно забезпечити оптимальне завантаження всіх його систем і передусім молотарки. Врожайність зернових культур на площі поля варіює в широких межах і може змінюватися в кілька разів у напрямку руху збиральної машини, що негативно впливає на роботу комбайна. Зменшення такого впливу можливе шляхом застосування систем автоматичного регулювання інтенсивності потоку вороху, що подається на робочі органи. Датчик в силовій передачі транспортера похилої камери постійно відстежує завантаження жатки. В місцях зі зниженою врожайністю швидкість руху автоматично збільшується, а з підвищеною — зменшується, що гарантує роботу комбайна на повній потужності незалежно від урожайності.
Для цього, наприклад, в комбайнах Challenger корпорація AGCO застосувала систему автоматичного підтримання оптимального завантаження молотарки Constant Flow. В конструкції комбайнів фірми CLAAS для підтримання оптимального завантаження молотарки застосовуються система CRUISE PILOT, а комбайни фірми New Holland оснащуються системою автоматичної подачі матеріалу IntelliCruise.
Аналогічні системи можуть застосовуватися й на прес-підбирачах.
Роман Войтович, учений секретар
Василь Думич, завідувач лабораторії
Львівська філія УкрНДІПВТ ім. Л. Погорілого
журнал “The Ukrainian Farmer”, вересень 2016 року
Усі авторські права на інформацію розміщену у журналі “The Ukrainian Farmer” та інтернет-сторінці журналу за адресою https://agrotimes.ua/journals належать виключно видавничому дому «АГП Медіа» та авторам публікацій, згідно Закону України “Про авторське право та суміжні права”. Використання інформації дозволяється тільки після отримання письмової згоди від видавничого дому «АГП Медіа».